کنترل
PID یک روش کنترل حلقه بسته است که سه سبک کنترلی تناسب، انتگرال و مشتق را با یکدیگر ترکیب میکند. کنترل تناسبی باعث ایجاد یک کنترل صاف و بدون تغییرات شدید میگردد. کنترل انتگرالی به طور خودکار خطای سیستم را اصلاح میکند. کنترل مشتق به سرعت به اختلالات پاسخ میدهد. کنترلر
PID مورد استفاده ترین نوع کنترل در پروسه های مختلف به حساب می آید. زمانیکه از این نوع کنترلر در سیستم استفاده میشود ترکیب کنترلهای تناسبی، انتگرالی و مشتق باعث تکمیل شدن یکدیگر شده و در نهایت منجر به کاهش خطاهای سیستم و رسیدن آنها به صفر در زمان کوتاهی در مقایسه با سایر تکنیکهای کنترلی می شود
. 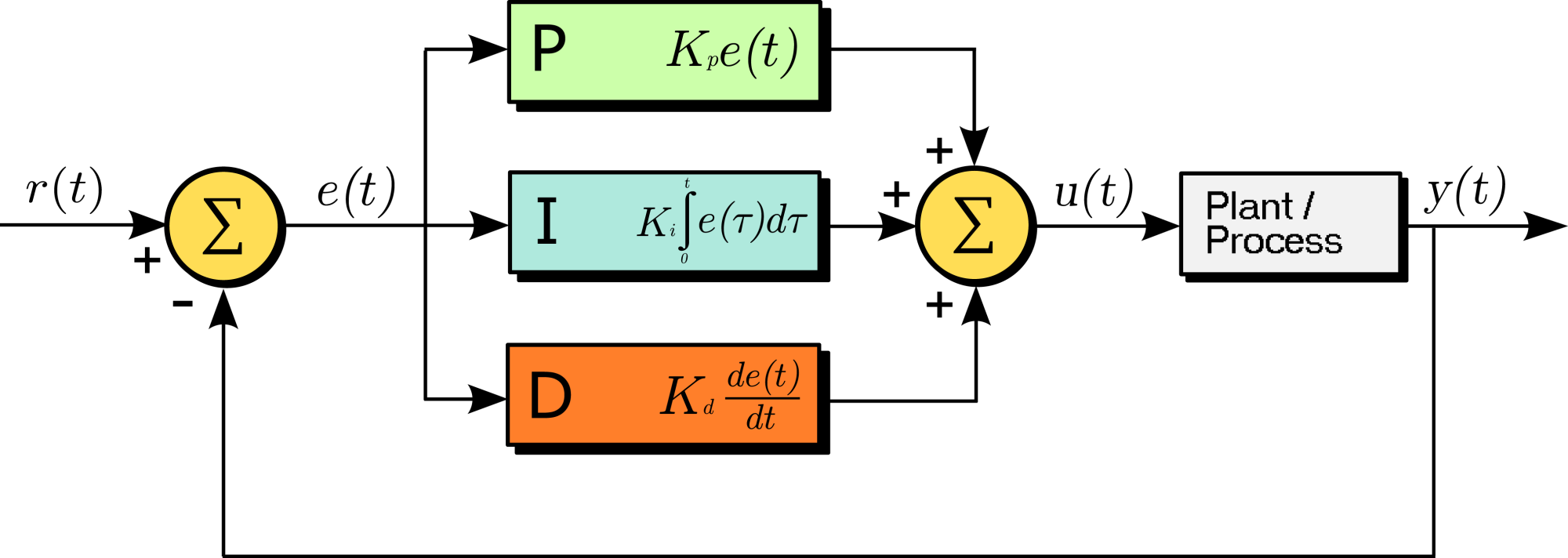
سیستم کنترل حلقه بسته ((Closed Loopبرای دستیابی به کنترل دقیق تر، پارامتر تحت کنترل باید اندازه گیری شده و با ورودی مرجع مقایسه شود و سیگنال تحریکی متناسب با تفاضل ورودی و خروجی به سیستم اعمال شده در نتیجه، خطا تصحیح شود. سیستمی با یک یا چندمسیر فیدبک مانند شکل ذیل، یک سیستم حلقه بسته نامیده میشود
. یکی از روشهای کنترل دقیق در سیستمهای دارای بازخورد یا حلقه بسته ، کنترل
PID می باشد. در این روش
: P مخفف
Proportional یا کنترل تناسبی
I مخفف
Integrator یا انتگرال گیر
D مخفف
Derivative یا مشتق گیر
تفاوت سیستم حلقه بسته و حلقه باز چیست؟(کلیک کنید)انواع فیدبک کنترل:—کنترل کننده تناسبی + انتگرال گیر + مشتق گیر
عملکرد کنترل تناسبی(Proportional)اغلب کنترلرها در صنعت به شکل پیوسته عمل میکنند، در این کنترلرها خروجی پیوسته در تغییر است تا بهتر بتواند میزان خطا را محدود کند و متغیر تحت کنترل را کنترل نماید. در این وضعیت حالتهای نوسانی عملکرد
OFF -ON از بین میرود. کنترل کننده های با خروجی پیوسته از ادغام حالتهای تناسبی، انتگرال و مشتق به وجود می آیند
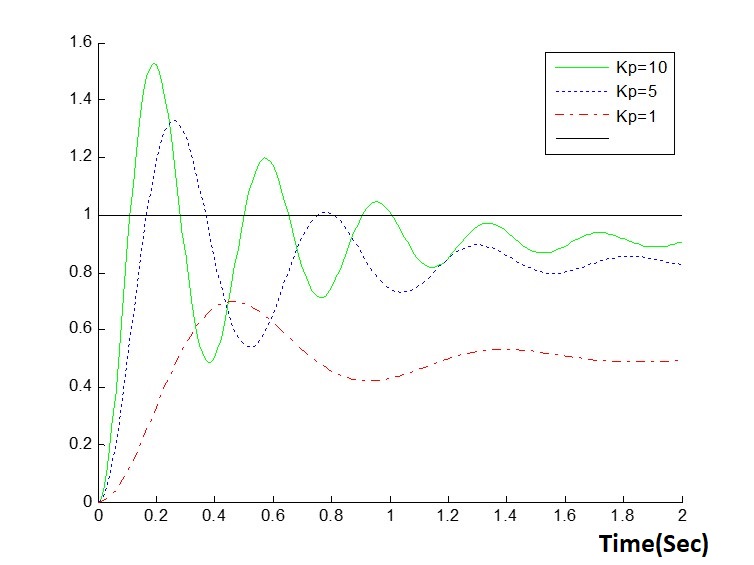
.در کنترلرهای با عملکرد تناسبی، خروجی از کنترل کننده در تناسب با مقدار خطاست. بدین معنی که با تغییر مقدار خطا،سیگنال خروجی از کنترلر در تناسب با آن زیاد یا کم می شود
.مساله مهم در مورد عملکرد کنترل تناسبی این است که در آن برای این که خروجی از کنترلر بتواند سیستم را در حالت باثبات نگاه دارد همواره باید مقداری خطا موجود باشد. از این رو کنترل دقیق سیستم امکان پذیر نیست و همیشه سیستم با قدری انحراف
(Offset) همراه است
عملکرد کنترل تناسبی انتگرال– (PI)
به منظور حل مشکل کنترل تناسبی و حذف انحراف همیشگی آن ، از عملکرد انتگرال استفاده می شود. انتگرال یکمنحنی بین دو نقطه عبارت است از سطح زیر آن منحنی بین آن دو نقطه. در عملکرد انتگرال، سطح زیر منحنی خطا،انتگرال منحنی خطاست. از این رو هر چند در عملکرد تناسبی، منحنی خطا دارای انحراف است، ولی چنانچه عملکردانتگرال را به آن بیافزاییم به مرور سطح زیر منحنی خطا )هر چند خطا کم باشد( زیاد می شود و این امر باعث افزایش سیگنال خروجی از کنترل کننده و کاهش مقدار خطا و انحراف می گردد.
عملکرد کنترل تناسبی انتگرال مشتق
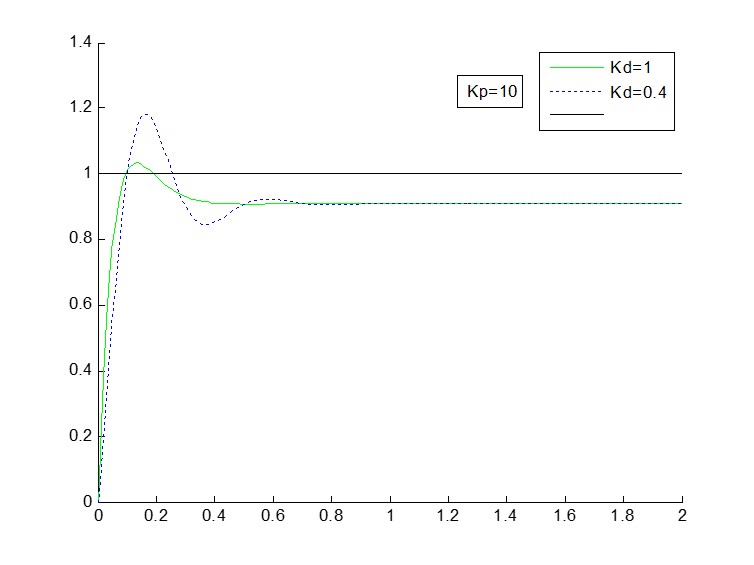
چنانچه گفته شد عملکرد انتگرال به گذشته نظر دارد. برای افزودن آینده نگری به سیستم کنترل، عملکردمشتق به دوعملکرد یاد شده اضافه می شود. مشتق یک منحنی در یک نقطه(در اینجا منحنی خطا )ضریب زاویه یا میل به آینده منحنی را در آن نقطه نشان می دهد. از این رو می توان در فرآیندهایی که در آنها جرم زیادی باید شتاب داده شوند یاشتابشان کم شود و یا گرم یا سرد شوند از آنها استفاده کرد.
کنترل کنندهPIDکنترل کننده های تناسبی به جهت از بین بردن نوسانات سیستم های کنترل
OFF / ON طراحی شده اند. این کنترلرها ازقابلیتی برخوردار هستند که به عملگرها
)شیرها، موتورها،جک ها ، رله ها و هیترها
(اجازه میدهند تا یک موقعیت نسبی بین حالت روشن یا خاموش به خود بگیرند. کنترلر تناسبی به عملگر اجازه میدهد تا به صورت آنالوگ و پیوسته تغییرکند
.کنترل کننده های تناسبی میتوانند کنترل دقیقتری از متغیرهای پروسه را به ما ارائه دهند چراکه خروجی این نوع کنترلرها میتوانند هر مقداری مابین روشن بودن کامل یا خاموش بودن کامل مطابق با اندازه سیگنال خطا باشد
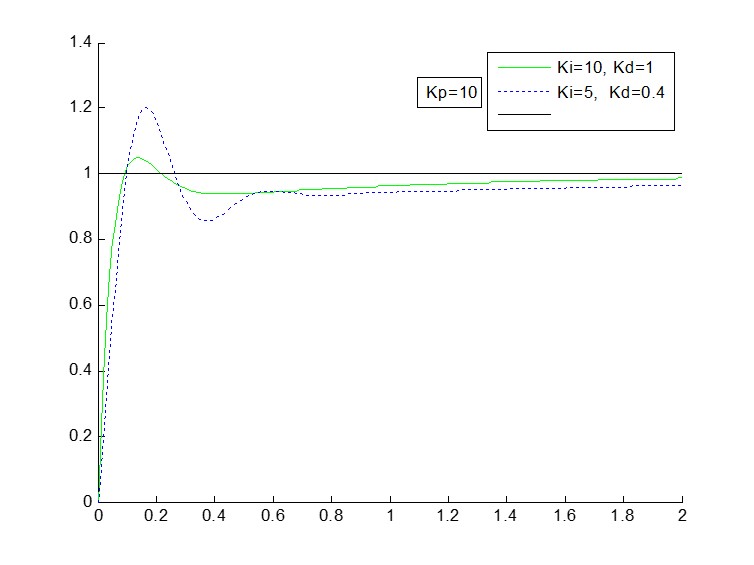
.تنظیم پارامترها:تنظیم پارامترهای Kp، Kiو Kdموجب تغییر مکان قطب های سیستم حلقه بسته می گردد. در واقع این که در هر فرمان کنترل باید چه نسبتی از تاثیرات پارمترهای فوق با یکدیگر جمع شوند را تنظیم پارامترها می گویند.
.PNG) نحوه انتخاب کنترل کننده ها:
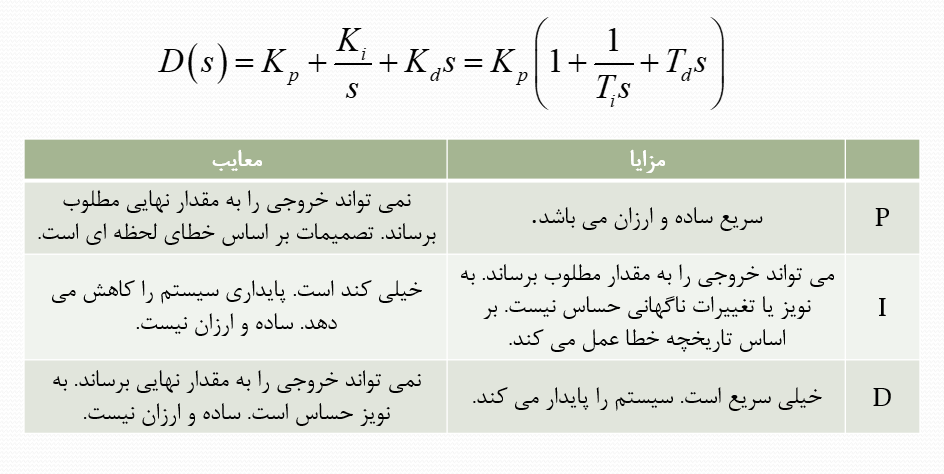
نحوه انتخاب کنترل کننده ها:P: وقتی که وجود آفست در سیستم مهم نبوده و قابل تحمل باشد یا وقتی که فرایند به طور طبیعی دارای ماهیت انتگرالی باشد.
PI: وقتی که آفست قابل تحمل نیست.
PID: وقتی جبران برخی لختی های طبیعی در سرتاسر سیستم مهم باشد و سیگنال های فرایند نسبتا عاری از نویز باشند.
PD: به ندرت استفاده می شود. به کارگیری آن باعث خواهد شد که سیستم کنترل با وجود مقادیر بزرگتر بهره کنترل کننده، همچنان پایدار باقی بماند.